LDO性能优化的应用技巧
总结
本文围绕LDO性能优化的关键环节,系统讲解了从启动过程控制、不同负载条件下的稳定工作到瞬态响应改善的全链路应用技巧。内容涵盖启动过冲抑制、CC/CR模式下电子负载适应性优化、启动振荡改善、负载瞬态响应增强、多器件并行设计等实用方向。本文旨在通过原理分析和方法总结相结合,为工程师提供一系列可实现的LDO电路优化方案,帮助实现更稳健、更高效的电源设计。
1 LDO基础知识简介
LDO(Low Dropout Regulator,低压差线性稳压器)是一种直流线性稳压器。其核心特点是能够在极低的输入输出电压差下稳定工作。压差是指在一定负载电流(即V in -Vout)下维持额定输出电压所需的最小输入电压与输出电压之差。例如,压降为0.2V的LDO意味着从3.3V输出稳定,输入电压只需要达到3.5V即可。
典型的LDO包含四个核心部分:参考电压源、误差放大器、调整管和反馈电阻网络,形成闭环控制系统。电路结构如图1所示。当由于负载或输入变化导致输出偏离设定值时,反馈电压随之变化。误差放大器检测到这一变化,反向控制调节管的导通程度,从而将输出电压拉回到目标值,形成动态、连续的精密调节过程。
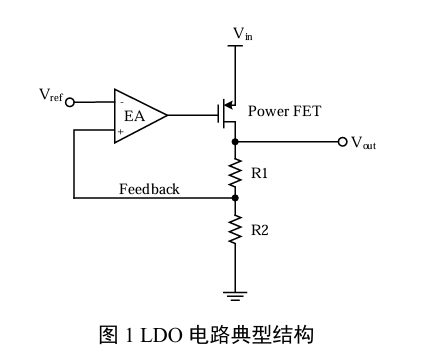
上述典型LDO结构是实现稳压功能的基础。但在实际复杂的应用环境中,需要保证自身及后续负载电路的安全可靠运行。 LDO通常集成了多种重要的保护功能模块。图2是胜邦微电子公司SGM2205[1]的内部结构图,集成了限流保护、过热保护、反向电流保护、快速放电电路等模块。

LDO的架构和工作原理理论上很清楚。然而,当工程师将其投入实际电路设计时,往往会遇到实际应用条件带来的一系列挑战。接下来,本文将重点关注LDO性能优化的关键应用场景,并讲解其相应的有效优化方案。
2 启动超调控制
2.1 生产原理

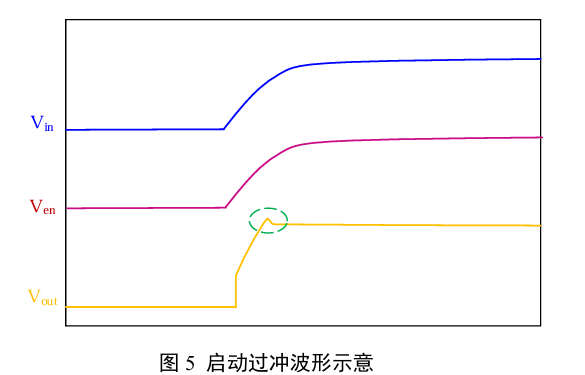
图3中,LDO的EN端通过上拉电阻与Vin相连,Vin从0开始缓慢上升。当Ven上升大于Vih时,Vout开始输出(图4中红色虚线标记)。此时Vin小于Vout_nom+Vdrop,LDO工作在压差区,Vout跟随Vin以Vdrop的压差上升,环路不工作。当Vin 上升到Vout_nom+Vdrop 以上时,循环开始将输出电压调整至设定值。然而,循环响应需要一定的时间。在此过程中,Vout仍会跟随Vin上升,导致输出过冲。启动过冲波形图如图5所示。

2.2 抑制方法
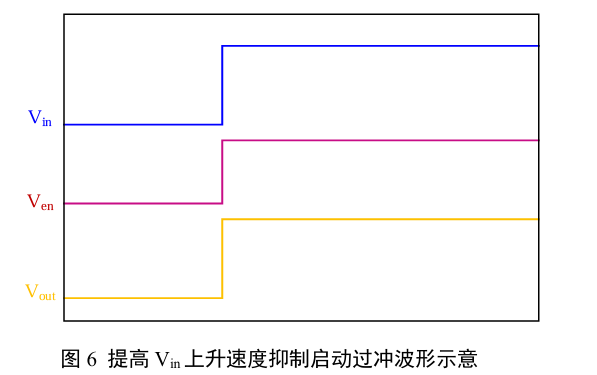
如果要抑制工作状态切换(从压降区到稳压区)引起的环路响应速度引起的输出过冲问题,一种方法是提高Vin的上升速度,使得当EN使能Vout输出时,Vin迅速上升到大于Vout_nom+Vdrop并进入稳压区,从而抑制输出过冲。波形图如图6所示。
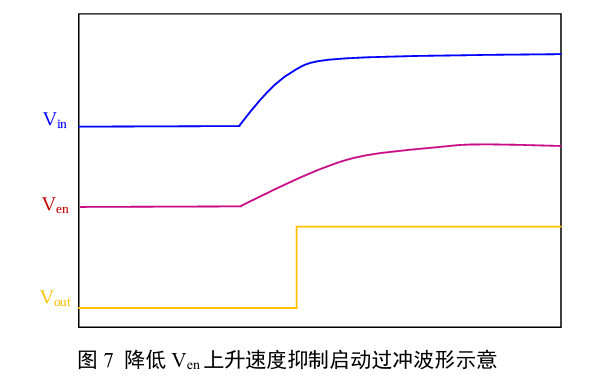
另一种实现方法是在EN端和地之间连接一个电容,以降低Ven的上升速度,这样当EN使能Vout输出时,Vin已经上升到大于Vout_nom+Vdrop,从而消除输出过冲。波形图如图7所示。
3 电子负载CC模式负载启动分析
在启动初期,LDO的输出电流能力并没有达到额定最大值,而是随着输出电压Vout逐渐升高而稳定增加。在此过程中,如果采用电子负载的恒流(CC)模式,并且设置较大的负载电流,则可能会因为LDO没有足够的负载能力而无法正常建立输出电压,从而导致启动失败。
其流程分析如下:
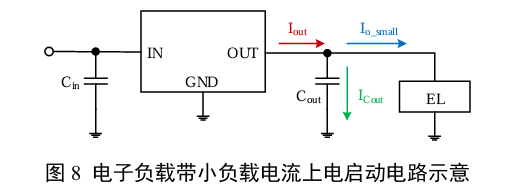
1、当电子负载(EL)上电,负载电流较小(记为Io_small)时,LDO最大输出电流Iout_maxIo_small,参考图8,假设Iout_max=50mA,Io_small=10mA,那么最多可以用40mA的输出电流给Cout充电,因此Vout可以正常建立。
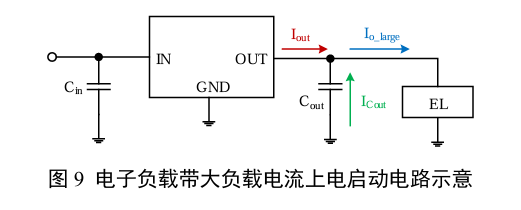
2. 当电子负载(EL)上电且负载电流较大(记为Io_large)时,LDO 的最大输出电流为Iout_max Io_large。参考图9,假设Iout_max=50mA,Io_large=100mA,由于Iout_max不足以供给EL Io_large被提取,所以Cout中存储的所有电荷一开始都会被EL提取。此时Vout降至0V,触发LDO输出短路保护。 EL最终能吸取的电流就是输出短路保护的限流值Ishort。由于没有多余的电流对Cout 充电,因此无法正确建立Vout。
4 使用电子负载CR模式时的注意事项
电子负载的恒阻(CR)模式并不是绝对的电阻,而只是模拟电阻特性。其工作原理是首先检测电子负载两端的电压,然后根据欧姆定律计算出其需要拉动的电流值。然而,在电压检测期间,负载电流处于不确定状态。因此,要特别注意避免电子负载开启瞬间,电子负载吸取的电流超过LDO的最大输出电流能力,否则LDO可能会因过流而触发短路保护功能。
5 LDO启动振荡改善
5.1 原因
LDO启动过程中启动电流过大可能会导致其输入电源振荡,表现为输入电压(Vin)振荡或反向沟道。波形如图10所示。
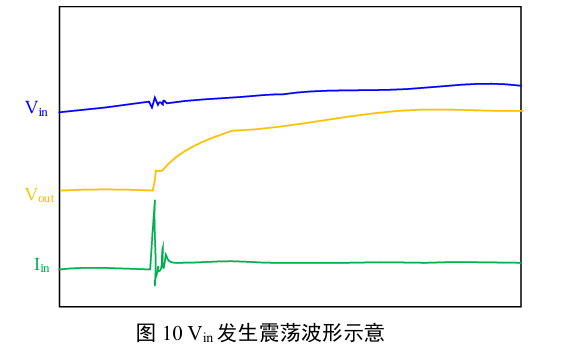
注:Vout 的起始平台是LDO 芯片本身的特性,与Vin 振荡现象无关。
5.2 改进方法
1.减小输出电容
根据公式I=Cx·(dU/dt),如果减小输出电容Cout,则启动电流会减小,Vin振荡也会得到一定程度的改善。
2.增加输入电容
增大输入电容Cin,一方面有助于稳定Vin电压;另一方面降低了Vin的启动速度,从而降低了Vout的启动速度。从公式I=C·x(dU/dt)可以看出,降低Vout的启动速度可以进一步降低启动电流,可以进一步改善Vin振荡。
6 负载瞬态响应优化
6.1 增加输出电容
通常LDO在输出端并联一个F级的大电容。无论何种类型的电容器,都存在寄生等效串联电阻(ESR);有效利用了ESR电阻。依靠大电容和ESR电阻会产生一个零点。合理设置零位位置可以保证系统的稳定性。另外,PCB板与芯片之间的连接会产生寄生等效串联电感(ESL),这也会对LDO的瞬态响应产生一定的影响。因此,在考虑负载瞬态响应的过冲/下冲电压时,还需要考虑两个因素:流过ESR电阻的电流会产生一定的压降,即VESR; 输出端的电容中也会存在少量的寄生ESL,电感上电流的变化也会产生压降,从而引起输出电压的变化,即V ESL,如图11所示。
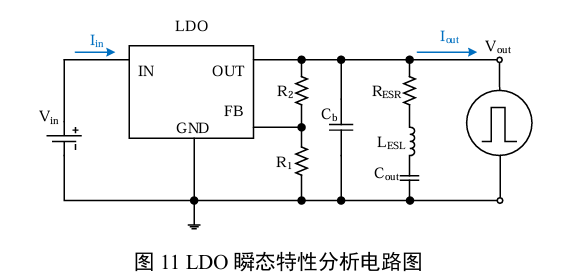
使用图11 中的电路来分析LDO 的瞬态特性。为了便于分析,在LDO的输出端施加一个从0到最大输出电流,然后从最大输出电流到0的负载电流值。
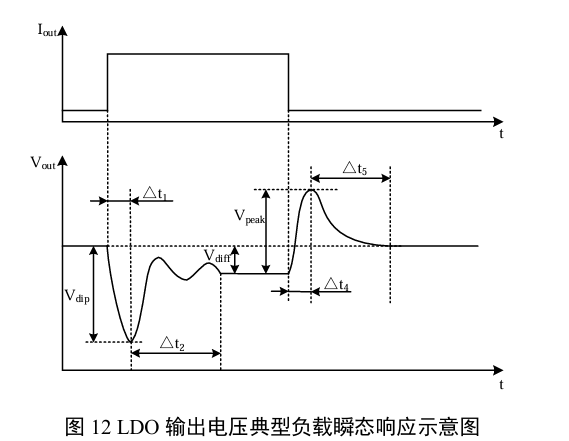
图12 显示了负载电流阶跃后的输出电压响应。从图12可以看出,如果负载电流Iout有一个由小到大的阶跃,输出电压将出现较大的下降,在t1时间内降低Vdip。此后,输出电压开始趋于平衡状态。经过t2时间后,输出电压达到稳定平衡状态。此时的输出电压比轻载时的输出电压低Vdiff(由负载调整率引入)。如果负载电流有一个从高到低的阶跃,输出电压将有一个很大的峰值,并在t4内上升到Vpeak。此后,输出电压开始趋于平衡状态。经过t5时间后,输出电压达到稳定平衡状态。此时的输出电压Vdiff高于重负载情况下的输出电压。如果定量分析的话,有:
 (3)
(3)
 (4)
(4)
式(3)中,VESR和VESL分别是输出电压变化对输出电容ESR电阻和ESL电感造成的压降。从式(3)可以看出,Vdip(peak)是负载电流变化幅度Iout、响应时间t1(4)、输出电容Cout和旁路电容Cb的函数。显然,增加Cout可以降低Vdip(峰值)。
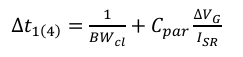
式(4)中,BWcl为系统环路带宽,Cpar为调整管栅极电容,VG为负载阶跃变化后调整管栅极电位的变化量,ISR为调整管栅极驱动电流。下面将进一步分析,增加假负载(即芯片功率电阻)可以增大系统环路带宽BWcl,从而减小响应时间t1(4),从而减小Vdip(peak)。
6.2 添加假负载
图13 显示了用于研究LDO 频率响应特性的系统的交流小信号模型。这里的调节元件是PMOS管。
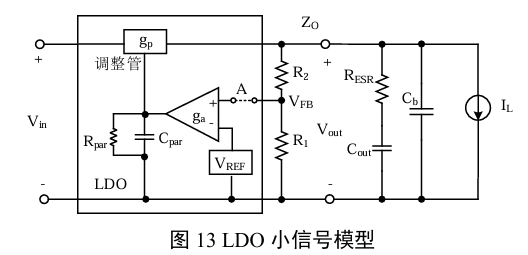
为了分析该系统的环路稳定性,需要首先断开图13中反馈环路的A点,然后分析系统环路的传递函数。根据增益辅助定理,VFB和VREF之间的传递函数为式(5)。
 (5)
(5)
假设误差放大器为一阶模型,即仅考虑其输出主极点对系统稳定性的影响; Rpar和Cpar分别为误差放大器与调整管连接点(即PMOS管栅极端)的等效电阻和对地电容; ga和gp分别是误差放大器和调整元件的等效跨导; ZO为输出端的等效阻抗,其表达式为式(6)。
 (6)
(6)
其中,Cout为LDO输出端外接的大电容,其串联等效电阻为RESR;旁路电容Cb(通常为100nF,即CbRESR。
结合式(5)和式(6),可以得到影响LDO系统稳定性的主要零点和极点如式(7)式(10)。
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
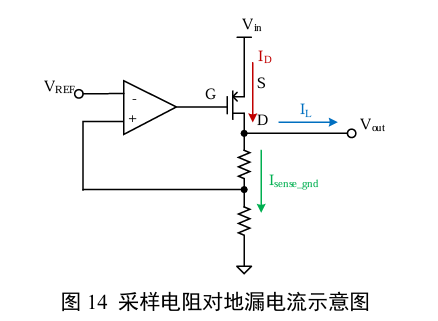
式(7)中,Rds1/ID,为PMOS调节管的沟道长度调制系数,ID为PMOS调节管的漏电流。注意,ID并不等于负载电流IL,还包括采样电阻的对地漏电流Isense_gnd,即ID=IL+Isense_gnd,如图14所示。通常规格书中给出Isense_gnd的最小值,以限制空载时主极点的最小值,保证最小系统环路带宽,以保证稳定性。
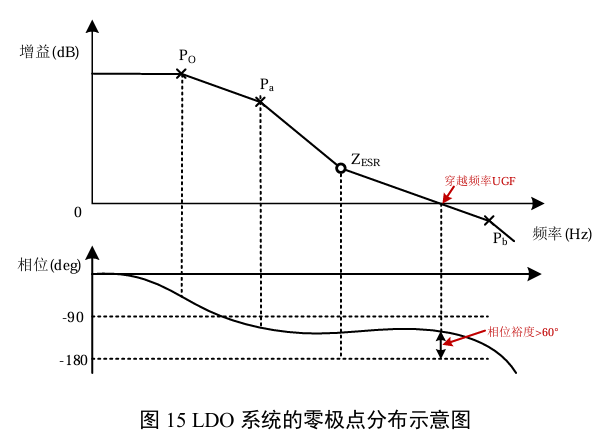
由式(7)至式(10)可知,主极点PO由输出电容Cout和等效负载RL’并联组成(RL’=RL||(R1+R2));极Pa由Rpar和Cpar并联组成,位于LDO系统内部; Pb极由旁路电容Cb和Cout的等效寄生电阻RESR并联组成;零点ZESR由RESR和Cout串联组成。
图15为LDO系统零极点分布示意图,包括环路幅频特性曲线和相频特性曲线。添加假负载(即在输出端人为并联一个电阻,此时输出等效负载RL’减小)会增加主极点频率(p=1/(RL’xCout))。零极点分布图显示,主极点PO被外推,因此交叉频率UGF也被外推,从而增加了系统环路带宽BWcl。由式(4)可知,系统环路带宽BWcl增大,响应时间t1(4)减小,Vdip(peak)相应减小。
7 个LDO 并联使用
7.1 精度和负载调整率
当两个LDO并联使用时,LDO1和LDO2的精度与并联后输出电压的负载调整率成正比。因此,从负载调整率的角度来看,直接并联更适合高精度LDO。详细内容请参见下面的理论分析。
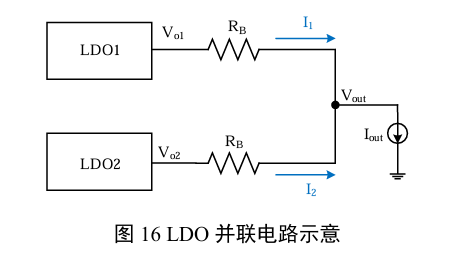
从图16分析可以看出,Vout=Vo1I1xRB=Vo2I2xRB。然后还有:
 (1)
(1)
对式(1)进行分析可得:
由于同一模型的不同样本之间精度存在个体差异,因此Vo1一般不完全等于Vo2,即(Vo1-Vo2)0,因此RB0。可见,必须存在两个平衡电阻RB。如果没有两个RB,那么Vo1(2)和Vout之间的导线的寄生电阻将充当RB的函数,但寄生电阻很小,会导致(I1-I2)很大,即一个LDO的输出电流比另一个LDO大得多。这可能会导致电流较大的LDO因功耗过大而触发过热保护。
由于分子(I1-I2)0,意味着I1和I2之间必然存在电流差(称为平衡电流)。实际应用中,RB的大小可以通过设置平衡电流值来确定。
在图16 中,LDO 的精度为Acc(%),输出电压值固定为Vfix。考虑最坏情况,即Vo1=Vfixx(1+Acc),Vo2=Vfixx(1-Acc),则Vo1-Vo2=Vfix x2Acc。设定I1和I2的平衡电流(I1-I2),由式(1)可得:
 (2)
(2)
从式(2)可以看出,当设定一定的平衡电流值时,平衡电阻RB的阻值与(Vo1-Vo2)成正比,因此RB与LDO的精度Acc成正比。
由于负载调整率=Vout(空载)-Vout(满载),因此需要分析空载和满载情况下的Vout值。
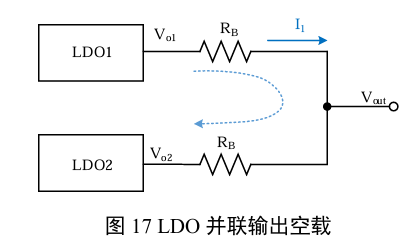
对于图17,Vo1=Vfixx(1+Acc),Vo2=Vfixx(1-Acc),则有Vo1Vo2。此时,有电流从Vo1到Vo2(图17中蓝色虚线),但LDO2没有吸收电流的能力,所以内部电路会控制LDO2的调整管关断。此时LDO2无输出,即Vout(空载)=Vo1。
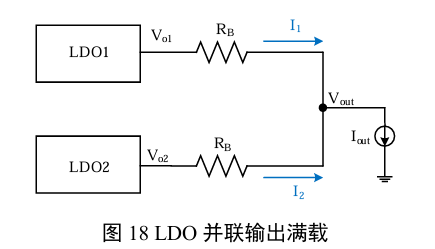
如图18所示,当输出开始加载电流时,Vout=Vo1I1xRB。只要Vout仍高于Vo2,LDO2就处于关断状态。此时,I1=Iout,因此Vout随着Iout的增大而减小。当Vout下降到小于Vo2时,LDO2开始工作,输出电流I2。此时,Iout=I1+I2,则Vout(满载)=Vo1I1xRB=Vo2I2xRB。
综上所述,负载调整率=Vout(空载)-Vout(满载)=I1xRB。可见,负载调整率与平衡电阻的阻值RB成正比。
从上面的分析可以看出,RB与LDO的精度Acc成正比。因此可以得出结论,当两个LDO并联使用时,LDO1和LDO2的精度与并联后输出电压的负载调整率成正比。负载调整率的值越小,要求的LDO精度值越小(即高精度),这也说明直接并联适合高精度LDO2。
Tips:两个RB的引入改变了LDO电路系统的零极点情况,对稳定性的影响需要进一步评估。
7.2 并行LDO 的优点
负载电流更大,可以支持更大的负载要求;
对于给定的负载电流,电源抑制比(PSRR)较高;
更好的散热性能;
较低的压降要求。
注意:必须使用平衡电阻将每个LDO 的输出连接在一起;在大电流应用中,平衡电阻会承受很大的功率,因此选择时需要确定合适的额定功率。
8 结论
LDO的可靠性和效率源于其内部环路、输入电源、输出负载和补偿网络组成的系统的协同优化。从启动到稳态负载,从瞬态响应到多器件并联,每一次性能提升都是基于对环路特性与外部条件匹配关系的深刻理解。这就需要我们在输出电容配置、负载特性适配和补偿网络设计之间进行精确权衡,然后采取相应的优化措施,构建稳定高效的电源路径。
参考文献
[1] SG Micro Corp. SGM2205 数据表[EB/OL]。 (2022-8)。 https://www.sg-micro.com/rect/assets/f75ab42b-df5c-4a29-aa27-f5e64edd45b6/SGM2205.pdf。
[2] SG Micro Corp. SGM2208 数据表[EB/OL]。 (2022-9)。 https://www.sg-micro.com/rect/assets/8d8524fc-a95f-4700-b785-32246e828256/SGM2208.pdf。
评论
1 EN 引脚是使能引脚。将EN 引脚设置为高电平以打开稳压器,将EN 引脚设置为低电平以关闭稳压器。如果不使用EN 引脚,则必须通过连接到IN 引脚的外部电阻将该引脚拉高。
2 例如,胜邦微电子公司的SGM2208在其规格书中提供了直接并行应用参考电路。 [2]
关于盛邦微电子
盛邦微电子(北京)股份有限公司(股票代码300661)是一家高性能、高品质的综合性模拟集成电路供应商。其产品涵盖信号链、电源管理、传感器、存储器等几大领域。公司拥有38个品类近7000个畅销型号,为工业与能源、汽车、网络与计算、消费电子等领域提供各类模拟和混合信号创新解决方案。