SDV域控器日志追踪与解析技术 – DLT
从研发到测试SDV域控制器的调试日志如今,随着汽车软件的复杂性不断上升,调试或跟踪在不同内核或分区上运行的复杂软件极具挑战性,而在POSIX 系统或车辆上逐步调试复杂软件往往更具挑战性。那么,如何在SDV域控开发测试环境中将带有时间戳等信息的应用、中间件和内核日志同步合并到同一个日志流中,从而更好地服务于软件工厂或“黑灯”测试工厂,或者为云AI平台提供日志调试软件? AUTOSAR推出的组件DLT的逻辑已经从诊断日志跟踪(D诊断Log和T竞赛)发展到更通用的开发日志跟踪(D开发Log和T竞赛)。
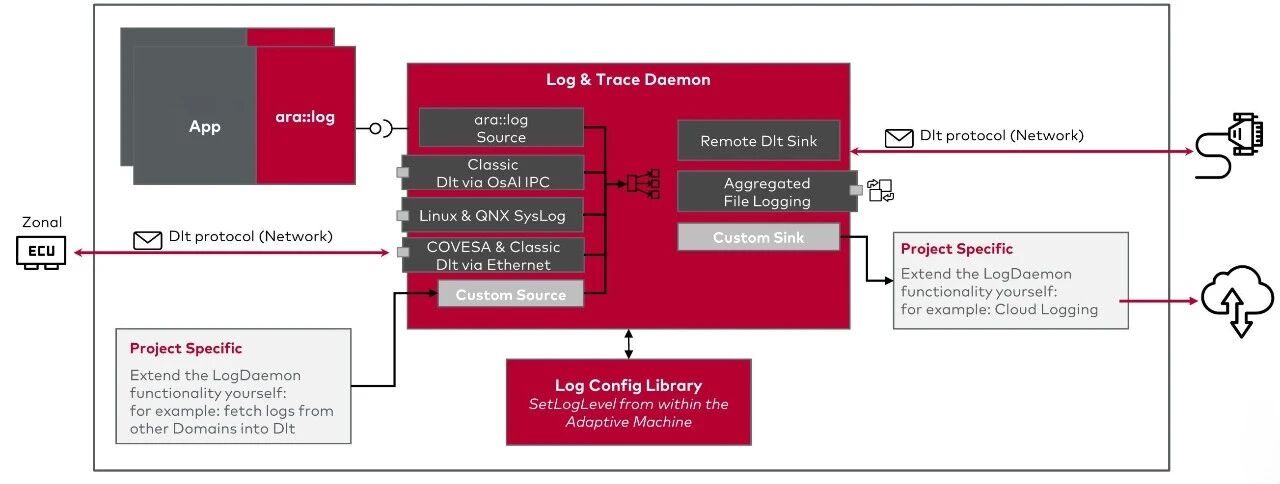
图1 SDV平台集成DLT调试日志
通常一些软件开发工程师有配置ECU的硬件调试环境,但其他工程师几乎没有配置“调试”ECU问题的环境。作为ECU软件的一个模块,DLT收集调试日志并跟踪ECU内部问题,可以加快故障排除和解决速度。过去,软件状态是通过CANoe或CANoe Option AMD/XCP集成不同的调试器或XCP来获得的,但它对于研发环境表现出广泛的多样性:
不同品牌的调试器和调试器扩展模块
ECU平台多样性和电路连接多样性
不同软件配置环境的许可证
不同的构建设置(例如软件工厂、HIL Farm)
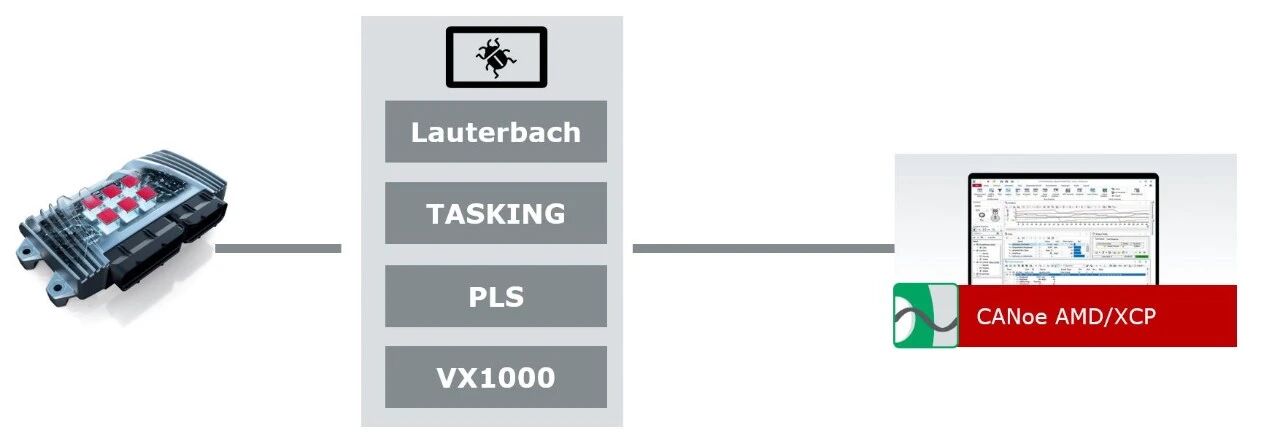
图2 CANoe Option AMD/XCP集成不同调试器或XCP获取日志
通过统一的DLT 作为调试方法,提高软件测试的灵活性和有效性,允许根据严重性级别(例如“致命”、“错误”或“信息”)过滤调试信息。该过滤器可以在运行时通过外部日志记录工具发送的DLT 控制消息进行修改。还可以直接通知应用程序新的过滤级别,以便仅针对选定的严重性级别生成调试信息,运行时将消息分发到另一个通信总线,或者将修改后的DLT 配置存储为NV 存储(如果硬件支持)。开发和测试工程师使用CANoe Option AMD/XCP支持CCP/XCP,也可以直接使用它来实现DLT数据的在线采集或离线分析。

图3 CANoe Option AMD/XCP直接获取XCP或DLT日志
Part 1DLT应用场景和协议概述DLT 是AUTOSAR 基础软件模块。虽然DLT协议与总线无关,但建议使用以太网等高带宽总线。尽管如此,DLT 协议并不限于使用以太网,无需调试器即可调试ECU,并允许用户在运行时进行配置。
使用DLT进行常规日志记录:应用程序/软件组件向DLT 模块提供日志消息
日志消息要么被过滤,要么由DLT 模块创建DLT 消息(取决于日志级别)
DLT模块向通信总线发送DLT消息
外部客户端接收并存储DLT消息
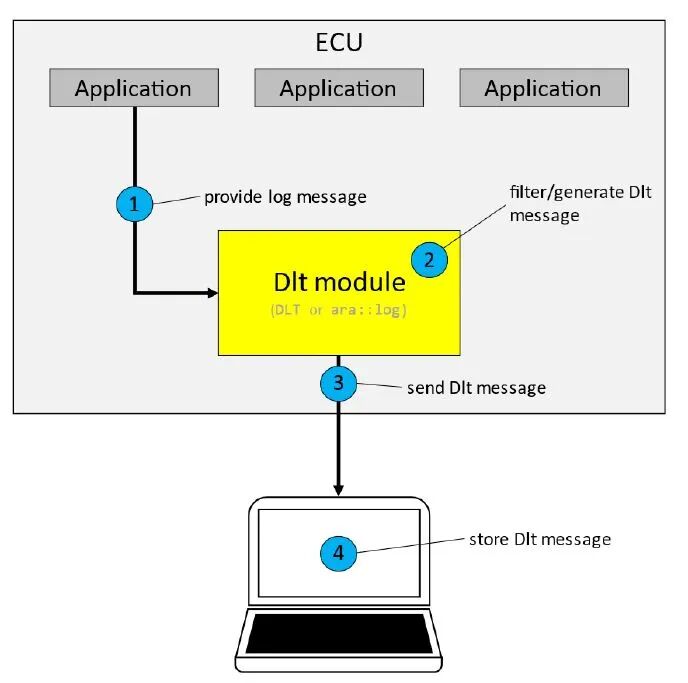
图4 AUTOSAR DLT 常规日志记录
中间件VFB日志:中间件调用DLT模块提供的接口函数,调用DLT API生成跟踪消息。
DLT模块将跟踪消息发送至DLT通信模块接口
DLT通信模块将跟踪消息转发到网络
外部客户端接收并存储跟踪消息
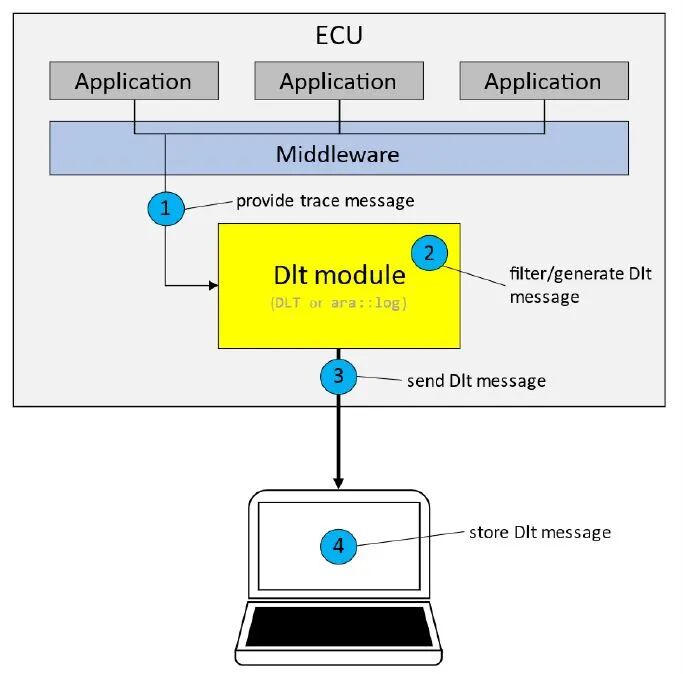
图5 中间件通过DLT记录日志
运行时配置DLT日志:外部客户端设置日志和跟踪级别并将更改发送到DLT 模块
通过DLT 控制消息将更改发送到DLT 模块
DLT模块相应地调整其过滤设置的配置
DLT模块通知应用程序新的日志级别
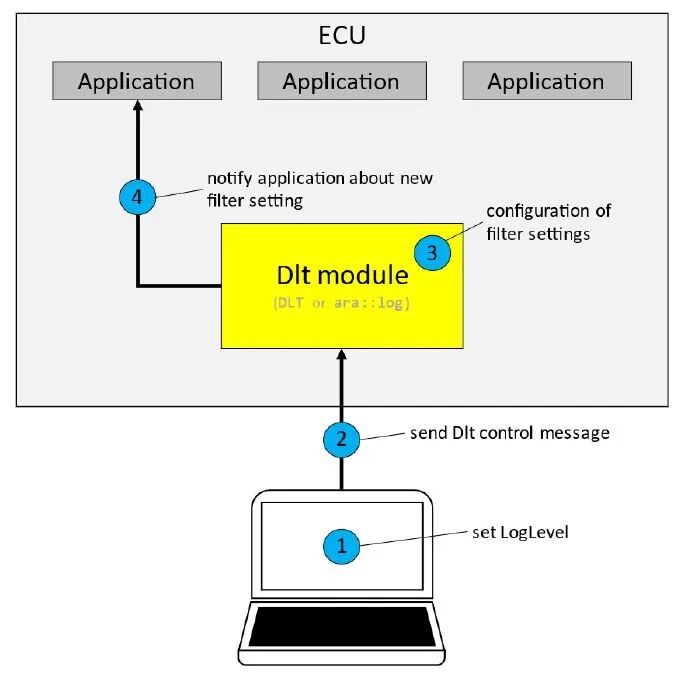
图6 运行时配置DLT日志
非冗长模式(Non-verbose)传输日志:使用外部解析文件来高效解析负载,从而避免在通信总线上发送有关变量的元素数据,从而节省总线通信开销。外部DLT 客户端存储此元数据以及接收到的参数值。
应用程序/软件组件向DLT 模块提供非详细日志数据
DLT模块过滤并生成DLT消息
DLT模块向通信总线发送DLT消息
外部客户端从外部文件获取元信息
合并后的信息由外部客户端存储
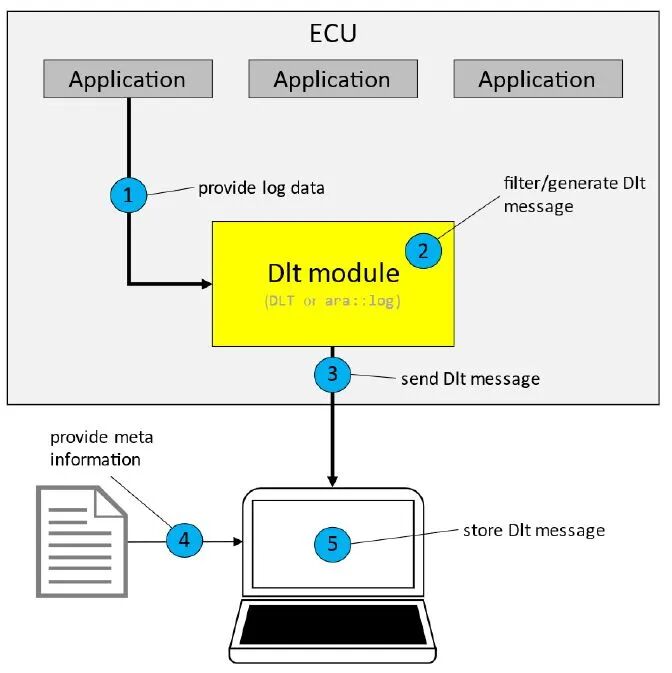
图7 非详细模式日志
DLT协议是高层协议,与使用哪条总线无关。 AUTOSAR规范中的DLT协议目前定义了两个版本,v1和v2,并随着日志和跟踪协议规范中的每个AUTOSAR版本逐渐演变和标准化。例如,在AUTOSAR FO R19-11和后续的R24-11(PRS)中,相关能力得到了改进和扩展。在AUTOSAR发布的早期阶段(2010年左右),Vector对ECU软件和工具链中的日志和跟踪机制进行了大量的工程实践,用于开发、调试和问题分析,并随着AUTOSAR规范的发展不断支持和实现DLT协议,最终发展到目前广泛使用的v2版本。
DLT v1 版本具有简单的标头和较低的消息开销,因此可以以较低的成本部署在带宽或资源受限的ECU 上。
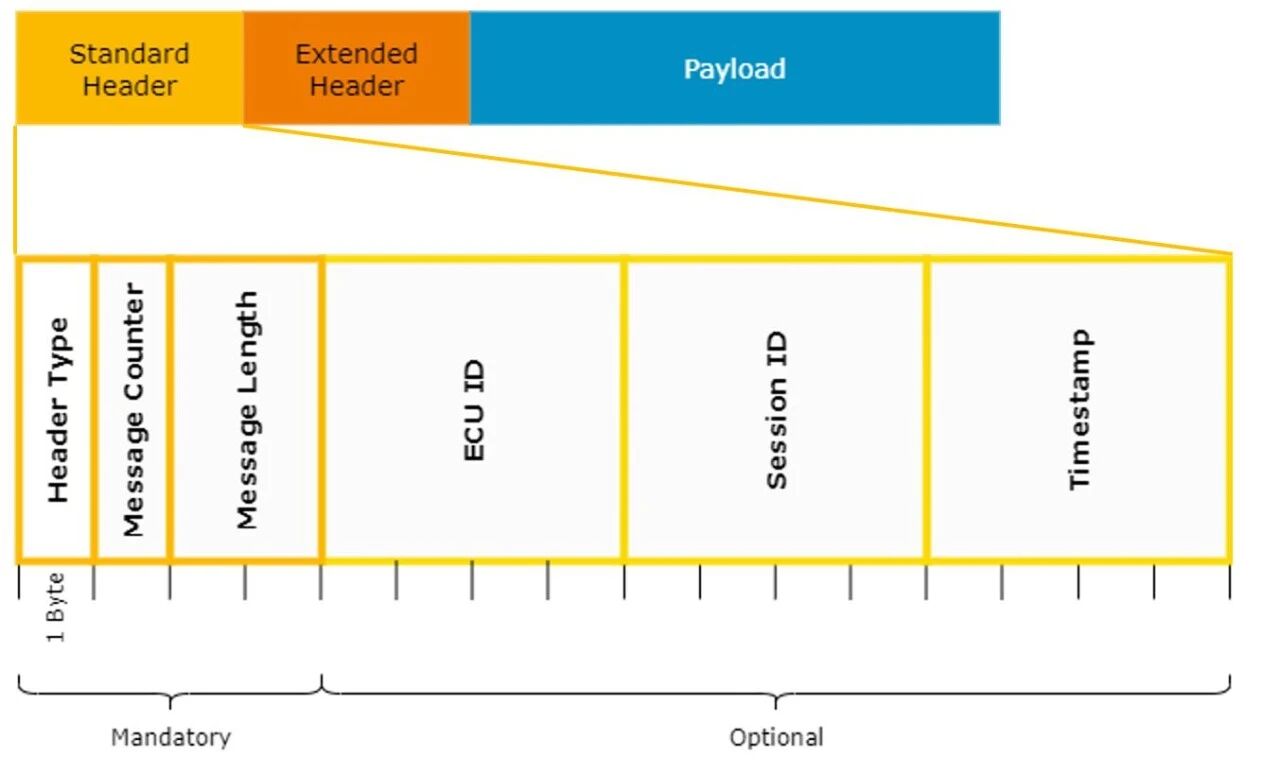
图8 DLT v1版本标准头
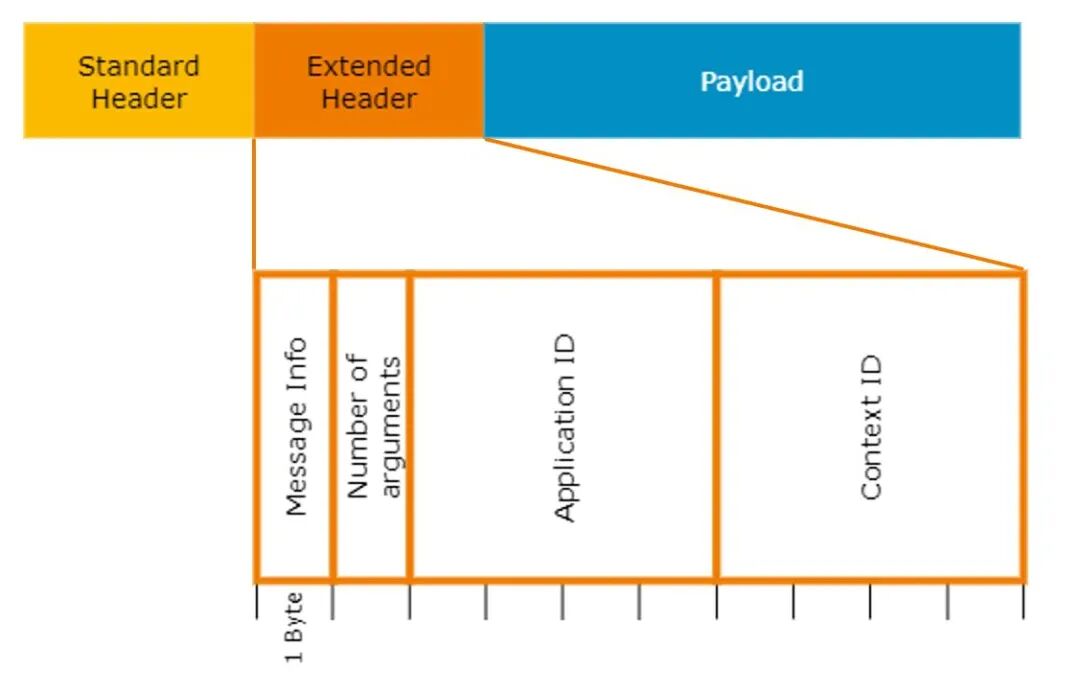
图9 DLT v1版本扩展头
DLT v2支持变长ID(动态ID)、高精度时间戳、分段传输(即超过单帧长度的消息可以分段重组),更适合大负载的场景。
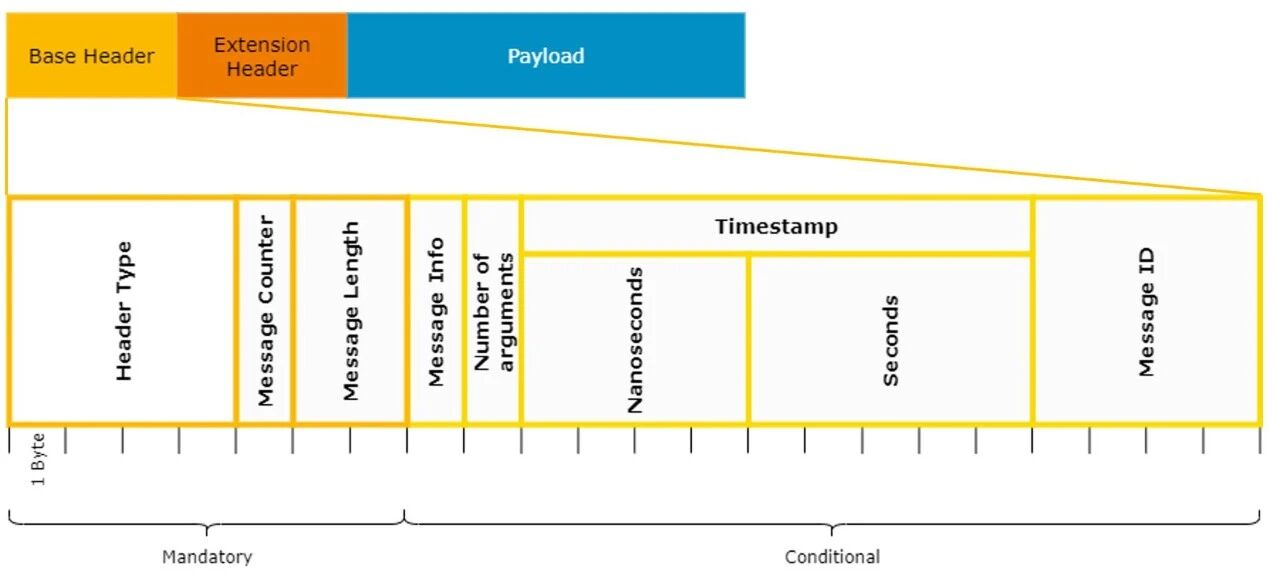
图10 DLT v2版本标准头
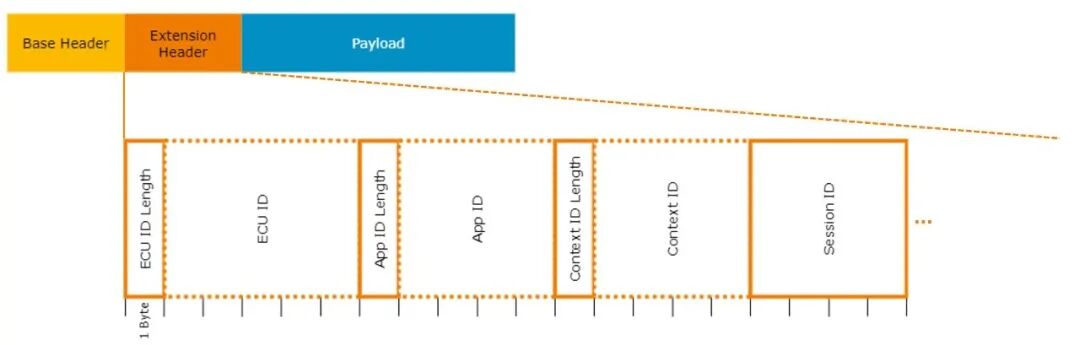
图11 DLT v2版本扩展头
该协议还定义了两种模式,即详细模式和非详细模式。两种模式都提供日志消息的严重级别:FATAL、ERROR、WARNING、INFO、DEBUG 和VERBOSE。两种模式的区别在于:
Verbose模式:发送包含所有参数/文本的完整消息,更易于阅读和分析,但消耗更多带宽。
Non-verbose模式:可以发送更紧凑的消息(例如,仅发送参数或ID)。消息结构可以通过FIBEX或ARXML数据库文件解析,适合在带宽有限的场景下减少开销。
Part 2日志追踪“利器” 带有DLT功能的CANoe Option AMD/XCP通过收集日志信息、捕获ECU 的跟踪数据以确保状态流的正确更改、检测ECU 是否报告错误(例如配置错误或基础软件BSW 错误)以及验证ECU 生成的事件序列是否正确来验证ECU 的功能是否正确。针对上述需求,ECU需要集成相应的DLT软件模块:
基于XCP的DLT集成:在现有的XCP协议栈上,只需在定义的事件中添加DLT API调用即可。如果配置中启用了相关功能,则DET和DEM事件将自动传输。 DEM 事件支持按需过滤。
基于AUTOSAR的DLT集成:作为XCP DLT的替代方案,允许API更改DLT的日志级别,以满足OEM集成DLT的功能要求。基于AUTOSAR 日志定义控制日志级别(致命、错误、警告、调试、信息、详细),将所有日志和跟踪聚合到集中式AUTOSAR 服务组件、基于软件的时间信息、多核和分区日志中。例如AUTOSAR AP中的ara:log提供了各个阶段的日志信息API。通过配置将日志发送到特定的日志接收者。如有需要,可以通过DLT实现远程调试。
CANoe Option AMD/XCP支持在开发调试过程中将A2L文件加载到CANoe中,并支持达芬奇工具在配置协议栈时配置额外的测量代码,直接生成CPU负载、任务执行等信息的测试代码,用于后续自动化验证。
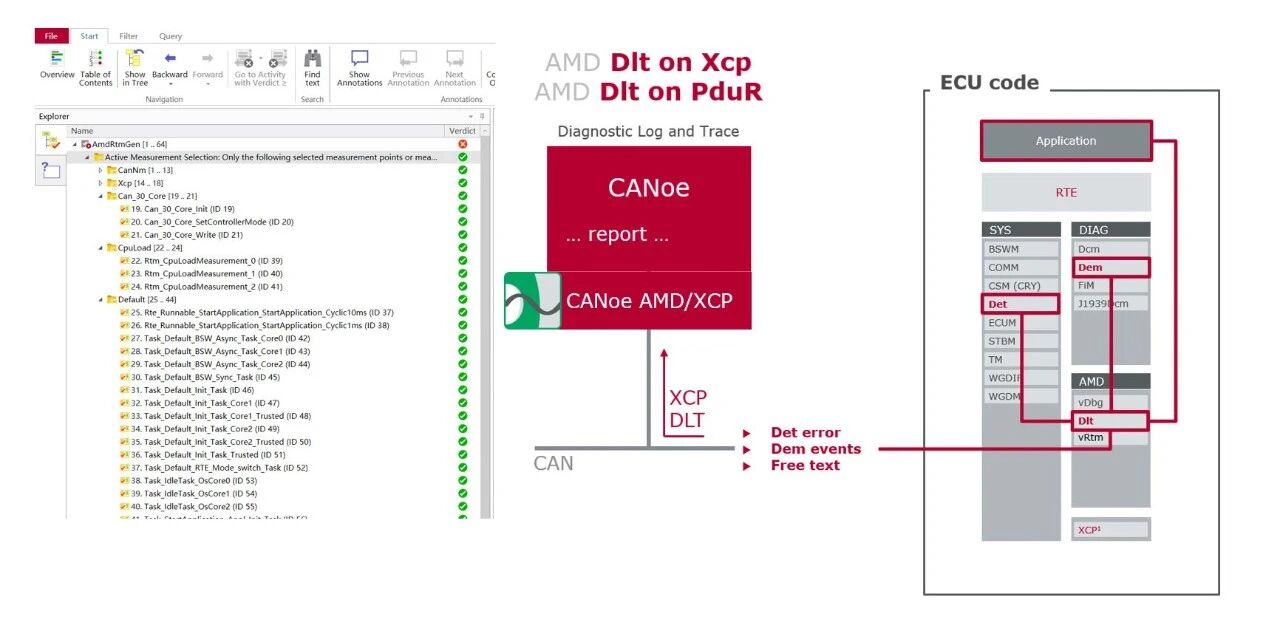
图12 CANoe 支持DLT 和操作测量的A2L 集成
CANoe支持DLT数据的在线和离线分析。它可以通过总线接口卡连接到真实的ECU以获取调试日志。对于WSL中的vECU等虚拟机,可以通过集成SIL Kit来获取调试日志。
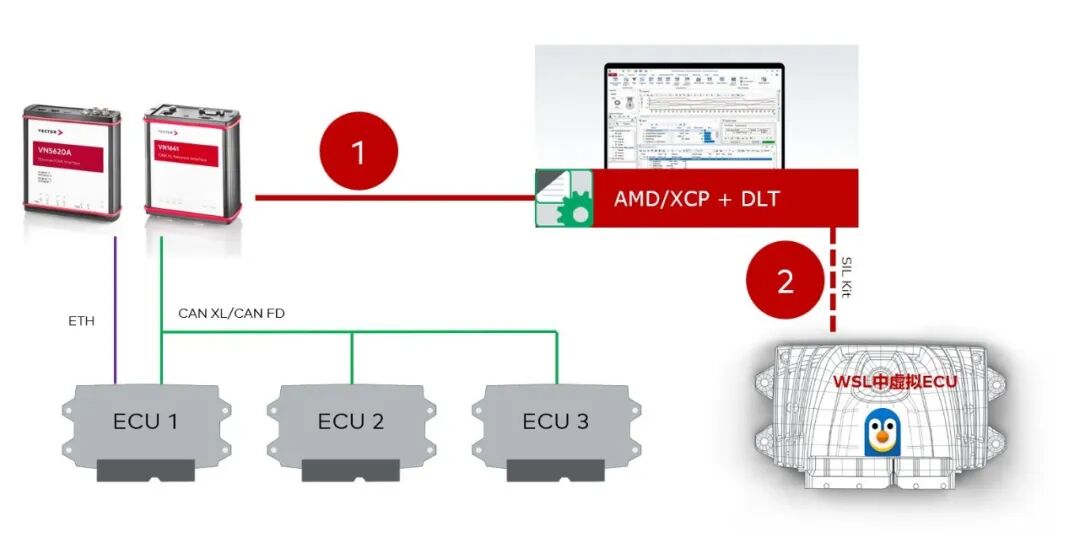
图13 真实ECU或虚拟ECU可通过CANoe实现DLT调试日志
CANoe 支持两种模式:Non-verbose 和Verbose。支持一键生成FIBEX中对应变量到CANoe工程中。配置项目节点后也可以导入相应的变量。
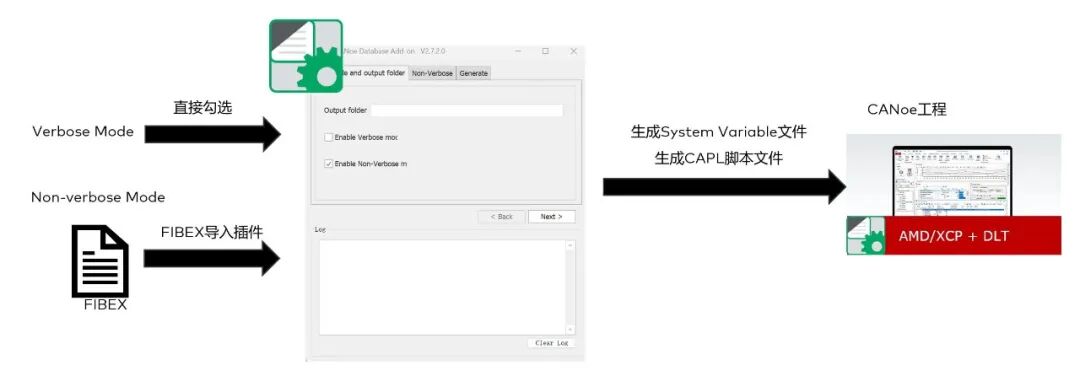
图14 CANoe中DLT配置流程
对于非详细模式消息的解析,插件会根据FIBEX 文件自动生成变量。 DLT 变量跟随每个以太网数据包帧,并直接解析并显示在跟踪窗口中。 DLT日志信息可以在图形窗口中以动态曲线的形式显示。
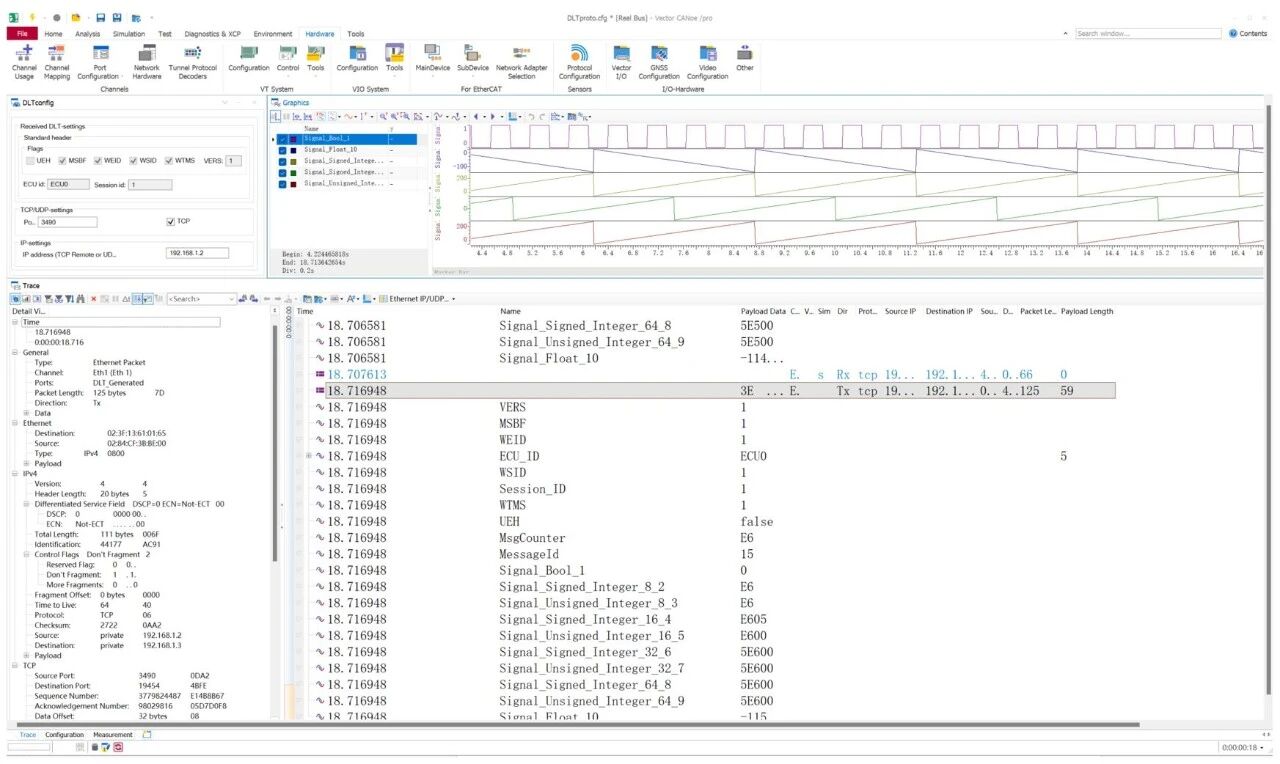
图15 CANoe解析Non-verbose模式日志
对于Verbose模式消息的解析,具体的Payload会直接解析成结构体并显示在Trace窗口中。
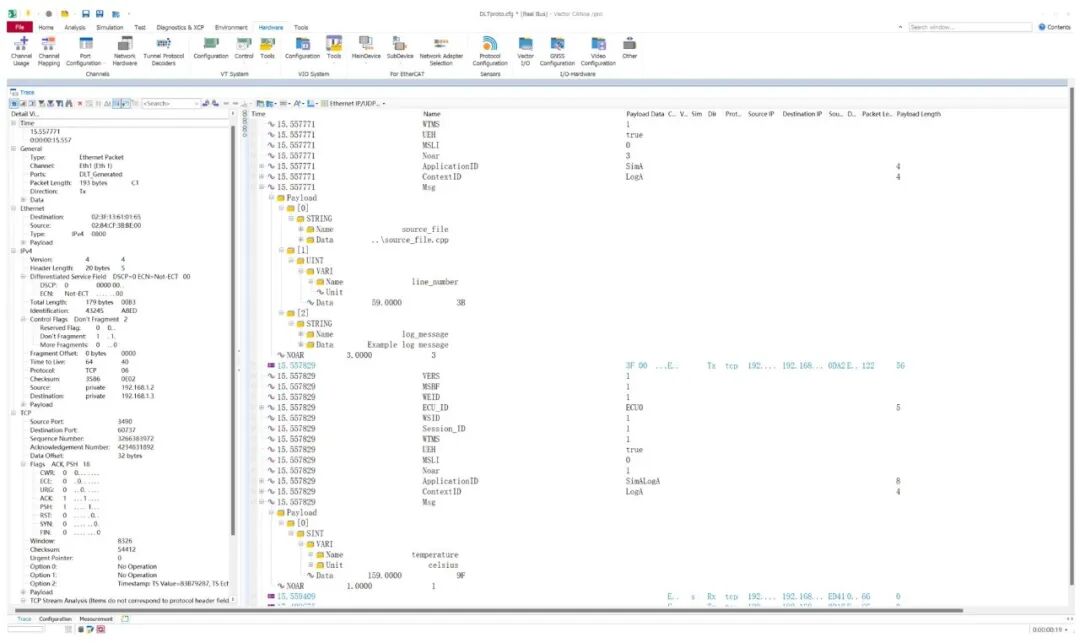
图16 CANoe解析Verbose模式日志
同时CANoe支持发送DLT Control Message,例如Set Log Level命令。
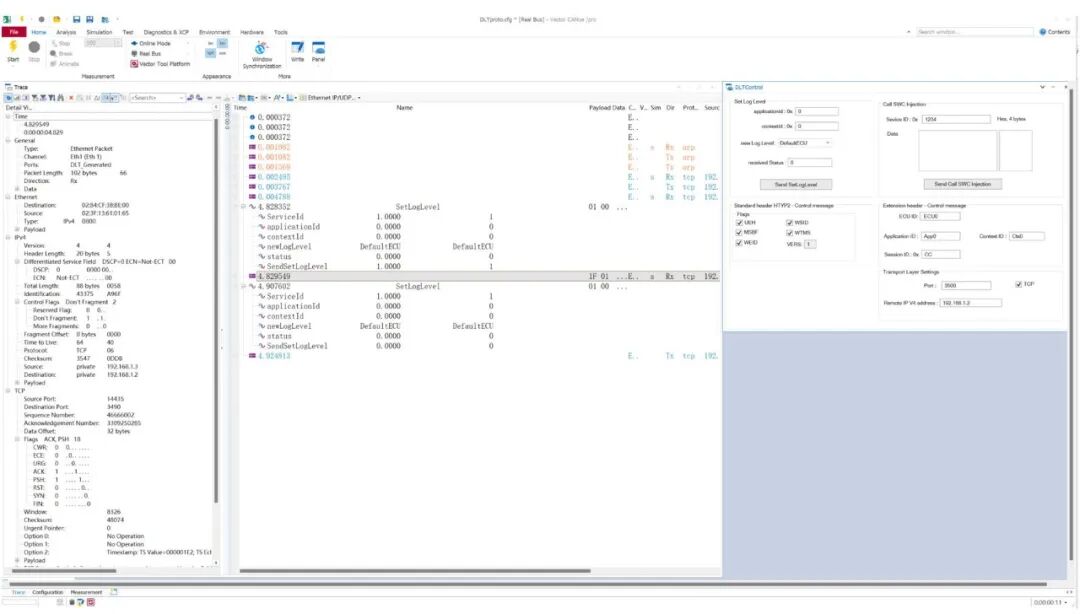
图17 使用CANoe发送DLT控制消息
Part 3总结和展望SDV开发迭代不可避免地需要更丰富的调试手段。 AUTOSAR DLT作为除调试器之外的另一种获取调试日志的方式,将更好地服务于车辆开发的各个方面。 CANoe Option AMD/XCP与DLT功能配合,提供更全面的功能。在获取CCP/XCP数据日志信息的同时,通过DLT帮助工程师更好地分析和调试ECU。当然,在车辆生产过程中应该关闭DLT,以满足网络安全需求。 DLT技术也在迭代,CANoe也将更好支持“软调试”技术,进一步提高便利性。