






一文解析伺服系统CN1接口的DI/DO端子功能
前言本文详细深入介绍了伺服系统CN1接口的DI(数字量输入)和DO(数字量输出)端子功能定义、逻辑选择原理以及硬件接线规范。明确了各终端的功能分类、参数关联以及典型应用场景。重点识别易混淆功能的核心差异,强化安全功能的设计逻辑。本文档适用于汇川IS620P等系列脉冲伺服系统。其他品牌(如松下、三菱、西门子)的伺服系统可参照本规范。具体功能需要结合相应品牌用户手册进行调整。
本文可为电气设计工程师、设备调试人员和故障排除人员提供标准化的技术支持。
伺服系统DI输入端子篇一、数字量输出DO端子的功能选择第1 部分
1:功能选择(上下滑动即可查看全表格)功能西文简称西班牙语
全名功能
分类功能
说明核心关联/应用场景S-ONServo ON 基本控制伺服使能:触发后,系统进入就绪待机状态,可以接收类似于电力开关的各种操作指令。如果没有触发,则操作说明无效。 ALM-RST报警复位故障
处理报警复位:故障停机且必须排除后,触发该信号清除故障记录。故障排除后,可进行手动复位,使伺服控制恢复正常。 CMD-MODE 命令模式选择操作模式控制主/辅操作切换:实现操作指令在主副任务之间多任务切换的控制要求,无需重新配置基本参数DIR-SEL 方向选择多段操作命令方向选择:多段操作预设的旋转方向(正转/反转)需要与CMD1-4 段选择信号配合使用。先设定方向,再选择具体操作段CMD1~CMD4 命令1~4 多段操作段选择信号:4 个二进制位组合可定义16 种操作指令。通过开关组合选择预置电台/速度/位置。 PLC无需重复发出指令。常用于固定站切换M1-SEL/M2-SEL模式选择。 1/2模式切换模式切换:实现控制模式切换(位置/速度/扭矩等),单次触发无效。需要预先在参数中设定组合对应的控制方式,以满足多工况控制要求。 POS-INHPosition Inhibi 位置控制位置指令禁止:伺服不再接收新的位置指令,但已执行的指令在定位过程中会继续暂时锁定位置,防止新的指令干扰当前工作站POS-ENPosition。启用多段位置指令启用:启用后,可以调用预设的多段位置参数,类似于电动窗帘的预设档位,可以快速切换到全开/半开/全关等固定位置。 ZCLMPZero Clamp Enable 零位固定使能:伺服通过定子磁场锁定转子,精确定位后确认当前位置为零进行位置保持,保证位置固定精度P-OT/N-OT 正/负超程安全保护正/负超程行程保护:检测到机械极限位置时触发,防止超程损坏设备。相当于机械限位的电气保护,避免机构因超程而碰撞。肌电紧急停止:最高优先级信号,触发后立即切断电机电源,电机自由停止,紧急避免突发危险,避免设备和人员安全事故。 VEL-LIMVelocity Limit Source 内部限速源:触发后,根据内部预设上限限制电机最高速度,忽略外部限速指令,确保电机在安全速度范围内运行,防止超速损坏。 P-TL/N-TL正/负扭矩限制正/负外部扭矩限制:限制相应方向的扭矩上限,防止扭矩过大对传动机构或工件造成损坏,保证设备、机械或工件的结构安全JOG+/JOG-点动正/负手动
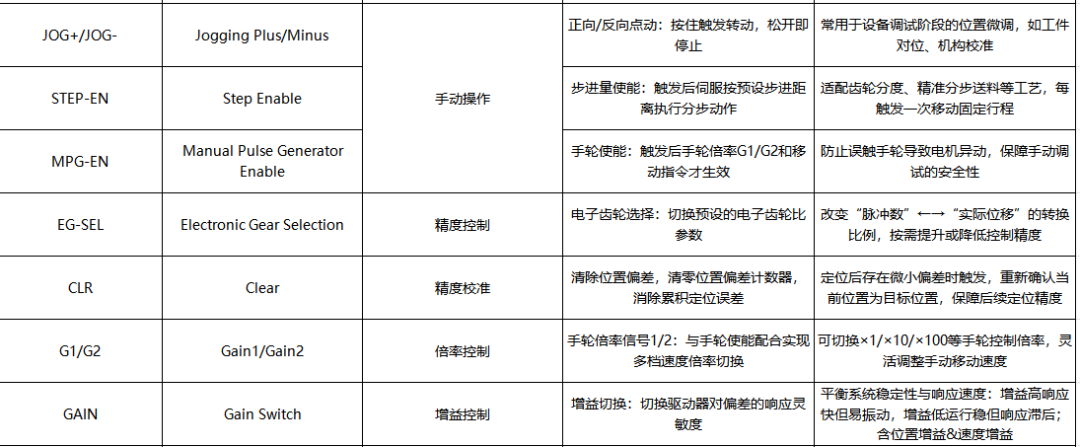
正反转点动操作:按住触发旋转,松开停止位置微调,常用于设备调试阶段,如工件对中、机构校准STEP-ENStep 使能:触发后,舵机按照预设步距进行步进动作。适应齿轮分度、精密步进进给等工艺。每个触发器都会移动固定的行程。 MPG-EN 手动脉冲发生器使能手轮:手轮倍率G1/G2 和移动指令只有触发后才生效,防止电机误碰手轮,保证手动调试的安全EG-SEL 电子齿轮选择精密控制电子齿轮选择:切换预设电子齿轮比参数,改变“脉冲数”“实际位移”的换算比,根据需要增减控制精度CLRClear 精度校准清零偏差,清除位置偏差计数器,消除累积的定位误差。定位后出现轻微偏差时触发,重新确认当前位置为目标位置,保证后续定位精度G1/G2Gain1/
增益2放大倍数
控制手轮倍率信号1/2:配合手轮使能,实现多档速度倍率切换。可切换1/10/100等手轮控制倍率,灵活调节手动移动速度。 GAINGain 开关增益控制。增益切换:切换驱动器对偏差的响应灵敏度。平衡系统稳定性和响应速度:增益高响应快但易产生振动,增益低运行稳定但响应滞后;包括位置增益和速度增益TRQ-DIRTorque。方向指令方向控制扭矩指令方向设定:定义扭矩模式下的扭矩输出方向,以适应压紧、拧紧等工艺,如正转夹紧、反转松开扭矩方向控制SPD-DIRSpeed Direction 速度指令方向设定:定义速度模式下的电机旋转方向,独立设定速度控制的方向,满足单向调速的工艺要求POS-DIRPosition Direction 位置指令方向设定:定义位置模式下接近目标位置的方向,保证按照预设执行定位动作路径并避免反向运动影响精度INT-CLRInterruption 清除中断
定长中断控制释放:中断任务正在进行中,执行退出中断模式,继续完成剩余行程。定长加工过程中出现暂时中断(如工件检查、突然暂停)后,需要“断点续传”才能完成剩余的加工。 INT-INHInterruption Inhibit 禁止中断且定长:不生成中断任务,防止中断功能生效,屏蔽中断事件。高精度连续加工(如长行程磨削、齿轮分度),需要避免不必要的中断干扰加工过程ORG-SWOrigin Switch 高级功能原点开关;检测机械原点位置的传感器信号,为回零动作提供位置参考,保证原点定位的准确性; ORG-SW ORG-EN 与ORG-EN 原点回归使能配合使用,可实现原点回归:触发后,启动自动回原点功能,实现设备开机或工作站复位后的原点校准,保证后续定位参考与PUL-INHPulse Inhibit 命令统一
屏蔽脉冲指令禁止:直接屏蔽脉冲信号接收,电机停止响应位置/速度控制比POS-INH更直接,快速屏蔽所有脉冲控制指令(如紧急情况下指令切断)由于表格内容实比较丰富也给大家截图方便观看,点击图片即可放大)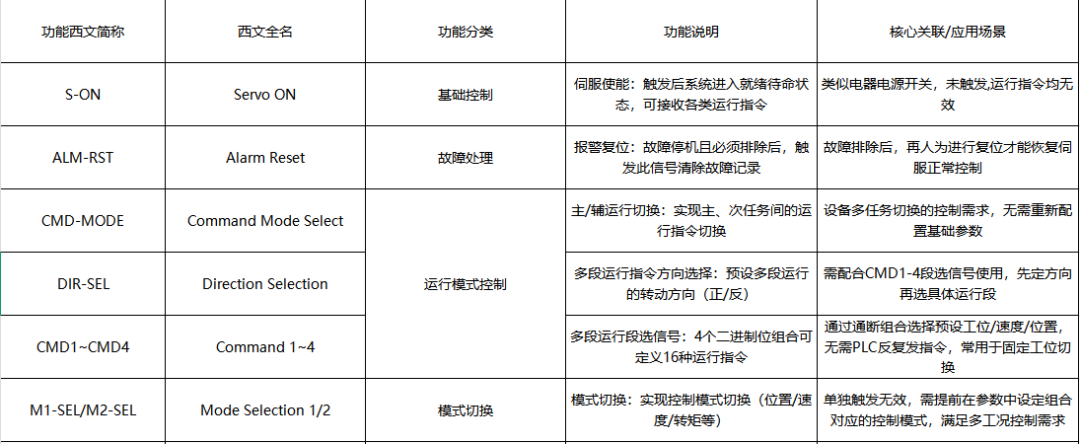


注:西文简称可以作为伺服接线的线码管的标识信息安全端子使用要点:急停(EMG)需要双路NC接线,通过硬线直接切断电机电源(驱动器控制电源需要保持通电以维持状态监控)。禁止仅通过软件逻辑处理急停功能;
限位(P-OT/N-OT)端子逻辑选择优先级设置为高电平有效。线路断线时(迎合《熵增定律》)可自动触发保护,防止设备因信号丢失而超程;
接线时需要统一信号类型。共阴/共阳极不能混用(PNP信号对应共阴极接线,NPN信号对应共阳极接线),否则DI输入端子对应的光耦可能不被激励,端子功能死。
易混淆DI功能对照表易混淆功能核心区别适用场景增益
增益切换切换位置/速度环增益参数组,以优化系统响应速度和稳定性。自动运行时不同工况切换(如高速定位/重载平稳运行)G1/G2
手轮倍率切换手轮控制速度倍率(1/10/100等),仅影响手动操作速度手动调试时移动速度调整(精调/快速移动) POS-INH
位置指令禁止不接受新的位置指令,但之前的指令将继续执行,直到定位过程完成并暂时锁定工作站(例如工件检测) PUL-INH
脉冲指令禁止直接屏蔽脉冲信号:电机立即停止响应所有位置/速度指令,并在紧急情况下快速屏蔽所有脉冲控制指令INT-CLR
取消中断是在中断发生后触发的。原任务恢复后,剩余行程暂时中断(如工件检测),需要“断点续传”,避免从头开始运行INT-INH
防止中断发生前触发中断,在中断发生前屏蔽所有中断事件 提前打开INT-INH 的‘保护屏蔽’ 任何中断信号都不能进入,保证任务从头到尾持续进行(二)逻辑选择Part.2
DI 数字输入端子的逻辑选择包括5 种类型:0=低电平有效,1=高电平有效,2=上升沿有效,3=下降沿有效,4=上升沿+下降沿有效。本文重点介绍工业场景中最常用的低层和高层主动。
(OC:Optocoupler,光耦,以下简称 OC)。驱动器上电后,依靠内部软硬件协同实现相关端子逻辑,见图DI-01
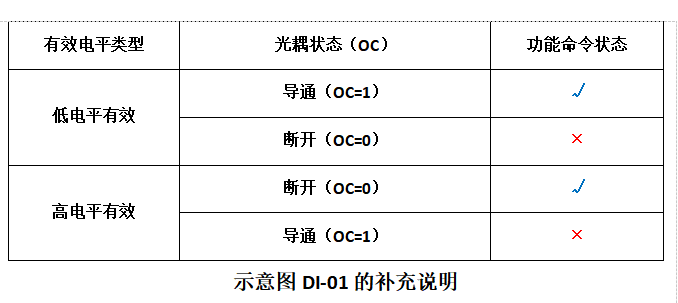
一、0 = 低电平有效:当硬件DI1端子关联的光耦OC=1(on状态)时,该端子定义的功能命令生效;当OC=0(关闭状态)时,该功能命令无效。
示意图DI-01左侧:端子逻辑选择低电平有效。当DI1的OC为0时,正向限位P-OT不激活,正向限位信号为假(False),不触发保护; OC=1,正向限位P-OT激活且正向限位信号为真(True)并触发保护。
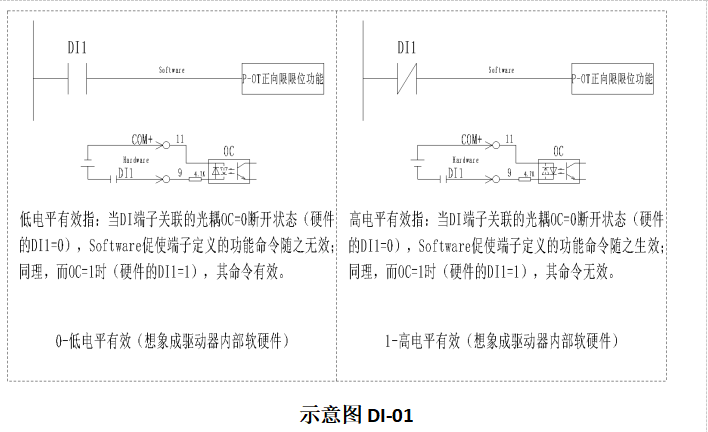
二、高电平有效:当与DI1 端子关联的光耦OC 为0(断开状态)时,该功能命令有效;当OC=1(导通状态)时,该功能命令无效。
示意图DI-01补充:端子逻辑选择高电平有效,DI1的OC=0,正向限位P-OT已激活,正向限位信号为False(True),触发保护; OC=1,正向限位P-OT激活,正向限位信号为True(False),不触发保护。
三、 为了增强对高电平输入有效概念的理解,再图示说明:示意图DI-02,DI1、DI2 正负限位端子逻辑定义为高电平输入有效。
当P-OT=0(NC 信号未激活,OC=1)时,此时原理图中DI-01 右侧软件DI1 的NC 位反转为开路状态,导致“P-OT 正转限位功能”=0,仍可继续正转运行。前进限位开关被激活(常闭触点)。此时原理图DI-02中DI1的OC为0。原理图DI-01中补充图导致“P-OT正向限位功能”为1,不能再正向运行,触发正向运行保护。另外,由于各种原因,DI1信号线断开,驱动器立即判定正转限位信号已被触发,无法进行正转操作。这样,安全事故就被提前遏制了(N-OT反向限制同理)。
注:高电平有效适用于急停、限位等安全功能,其核心优势在于:当线路断开时(OC=0),功能命令生效(禁止相关运动),从而把安全事故遏制在萌芽状态。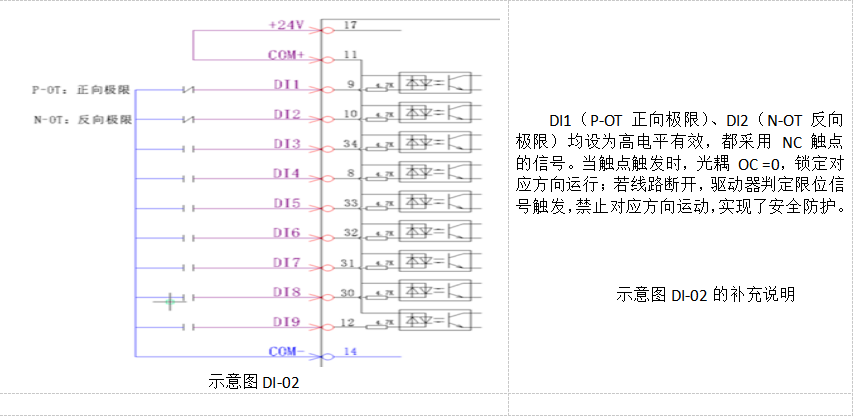
(三)与上位机硬件接线及有效电平第3部分
DI 端子与上位机的接线需匹配上位机输类型(NPN/PNP),确保有效电平逻辑一致,具体接线方式如下: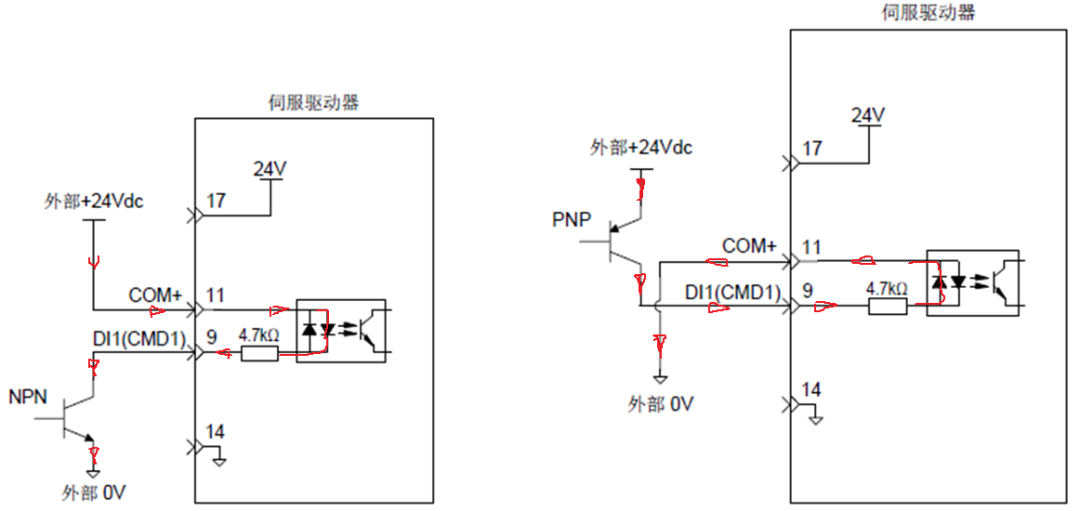
左:低电平输入有效 右:高电平输入有效示意图DI - 03:DI 端子与上位机硬件接线图(参考点:0V,检验点:DI1 9#端子)1:原理图DI-03 左侧电路是与上位机的硬件连接,具有NPN 输出。 COM+11#端子接电源+24VDC。当前的流程顺序是:
+24VDCCOM+ 11#端子OC的右侧二极管4.7KDI1 9#端子NPN晶体管0V若此时上位机NPN=0处于截止状态,则9#端子电位为+24VDC,CMD(命令)=0。若NPN=1接通,则9#端子电位为0VDC。对于硬件OC来说,就是说低电平输入有效。
2:原理图右侧DI-03电路是与上位机进行PNP输出的硬件连接。 COM+11#端子连接电源的0VDC。当前的流程顺序是:
+24VDCPNP晶体管DI1 9#端子4.7KOC的左侧二极管COM+ 11#端子0V若此时上位机PNP=0处于截止状态,则9#端子电位为0VDC,CMD(命令)=0。若PNP=1有效,则9#端子电位为+24VDC。对于硬件OC来说,就是说高电平输入有效。
注:硬件层面的 “高低电平有效” 是指端子电位状态(0VDC/+24VDC),与端子逻辑选择中的 “高低电平有效” 是 “硬件实现” 与 “功能定义” 的关系,极其容易混淆,务必特别留心区分。伺服系统DO输出端子篇一、 数字量输出DO端子的功能选择第1 部分
(一)功能定义(上下滑动即可查看全表格)西文简称西文全名功能分类功能说明应用场景S-RDYServo Ready 状态反馈伺服就绪:伺服系统上电正常,无故障,无警告。进入就绪状态。设备启动过程中,反馈给PLC,伺服可以接收到运行命令的信号,并触发后续动作。 MRMotor Rotation:实际转速>0r/min,仅表示电机在旋转,并不表示已达到目标转速。监控电机是否处于运行状态(如输送线是否启动),用于流程联动以确定S-STOPSpeed。停止零速信号:实际转速1r/min(关联零速判定阈值参数)。电机停止后,向PLC反馈“停止”信号,触发抱闸锁或下一个过程S-MATCH速度匹配。速度一致:实际速度与给定速度的偏差0.5%(关联速度偏差报警值)。多轴同步运行(如龙门联动),反馈各轴之间的速度同步状态,保证运动一致性P-CMPPosition 定位完成:实际位置与目标位置的偏差“定位窗口值” 定位任务完成后,向PLC 发送信号,启动下一个定位或加工任务P-NEARPosition 近定位逼近:实际位置与目标位置的偏差“定位窗口值” 定位任务接近完成时预警避免动作延迟BRKBrake 执行控制抱闸控制:当S-ON=1 时,抱闸延时释放,当S-ON=0 时,立即抱闸(DC24V)。停机后防止滑动(如防止立轴掉落)并确保工作台固定。 WARNWarning 故障警告警告提示:系统检测到非致命异常,可以继续运行并记录相应的警告代码(通过ALM-CODE读取)以排除轻微异常。 S-LMTSpeed Limit 速度限制:实际速度最大速度限制值(关联电机额定速度)。给定速度超出电机负载范围,伺服强制减速。状态反馈。
ALMAlarm故障反馈故障报警:系统出现致命异常,需要停机排除故障后才能恢复运行。向PLC发送故障信号,触发设备紧急停止,查找故障原因。 ALM-CODE报警代码故障代码输出:输出3位二进制组合报警代码。配合手册“故障处理章节”,通过伺服面板或PLC读取代码,定位故障类型INT-P-CMP中断位置完成中断反馈中断定长完成:原定位任务中断,已到达中断目标位置。急停等中断事件发生后,将中断位置状态反馈给PLC,为“断点续传”做准备。 Z-RETZero 返回完成基线反馈原点回零完成:通过通过“接近开关+编码器Z相”方法找到机械原点回零动作后,反馈原点校准成功,实际位置清零到机械零点。 E-ZRETElectricalZeroReturnComplete 电气回零完成:通过编码器的绝对位置快速移动到设定的零点,无需机械原点开关。无机械原点开关的设备(如小模块),快速建立定位基准,提高调试效率。 IA-ICInitialAngleIdentificationComplete 校准反馈初始角度识别完成:编码器上电后复位,校准转子与编码器的角度对应关系。伺服首次上电或更换编码器后,完成反馈角度校准,保证控制精度。 T-ACHTorque 达到过程反馈扭矩到达:实际扭矩设定扭矩的95%(与“扭矩给定值”参数相关)压紧、拧紧等过程,反馈负载已达到目标压力,触发下一步动作S-ACHSpeed 达到速度到达:实际速度设定速度的98%(与“速度给定值”参数相关)调速过程中,反馈电机已稳定在目标速度,可以开始后续处理动作由于表格内容实比较丰富也给大家截图方便观看,点击图片即可放大)
(二)逻辑输出选择输出端子逻辑选择(参考所附示意图DO-01)情况1:选择“0-输出低电平有效时(光耦导通)”
当DO定义的功能为“真”时(例如伺服准备好):光耦打开DO1端子的“DO1+”和“DO1-”之间的关系相当于“短路”。万用表测量对应端子6#7#,电压约为0VDC。
情况2:选择“1-有效时输出H高电平(光耦关闭)”
当DO1定义的功能为“真”时(例如伺服准备好):光耦关闭DO1端子的“DO1+”和“DO1-”之间的连接相当于“开路”万用表检测到对应端子6#7#的高电平信号
(因为两端没导通,电压差是外部电源的电压)。注:西文简称可以作为伺服接线的线码管的标识信息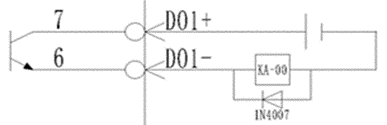
DO-01示意图
参考文献:汇川科技IS620P系列伺服驱动器用户手册
GB/T 19939-2005,伺服系统通用技术条件。
作者:李英碧。