CW32L012“哈基汪”开发套件快速上手指南(附资料)
一、哈基汪介绍CW32L012 Harkiwang是一款基于CW32L012C8T6小型机器人控制板的智能小车。 CW32L012C8是武汉芯源半导体有限公司推出的一款高性能、超低功耗的32位处理器,主频96M,64K FLASH,8K RAM,工作温度范围-40度到85度。
CW32L012哈基汪功能丰富:语音智能操控:可以通过说前进、后退、左转、右转、加速、减速、摇尾巴等与车互动;
蓝牙遥控:手机app连接蓝牙远程控制汽车;
红外遥控:可以通过小型红外遥控器远程控制小车;
超声波自动避障:行驶中的小车会自动识别障碍物并避让,防止碰撞和损坏小车;
自动切换汽车形态和四足机器人形态,秒变摇尾巴。
资源参考图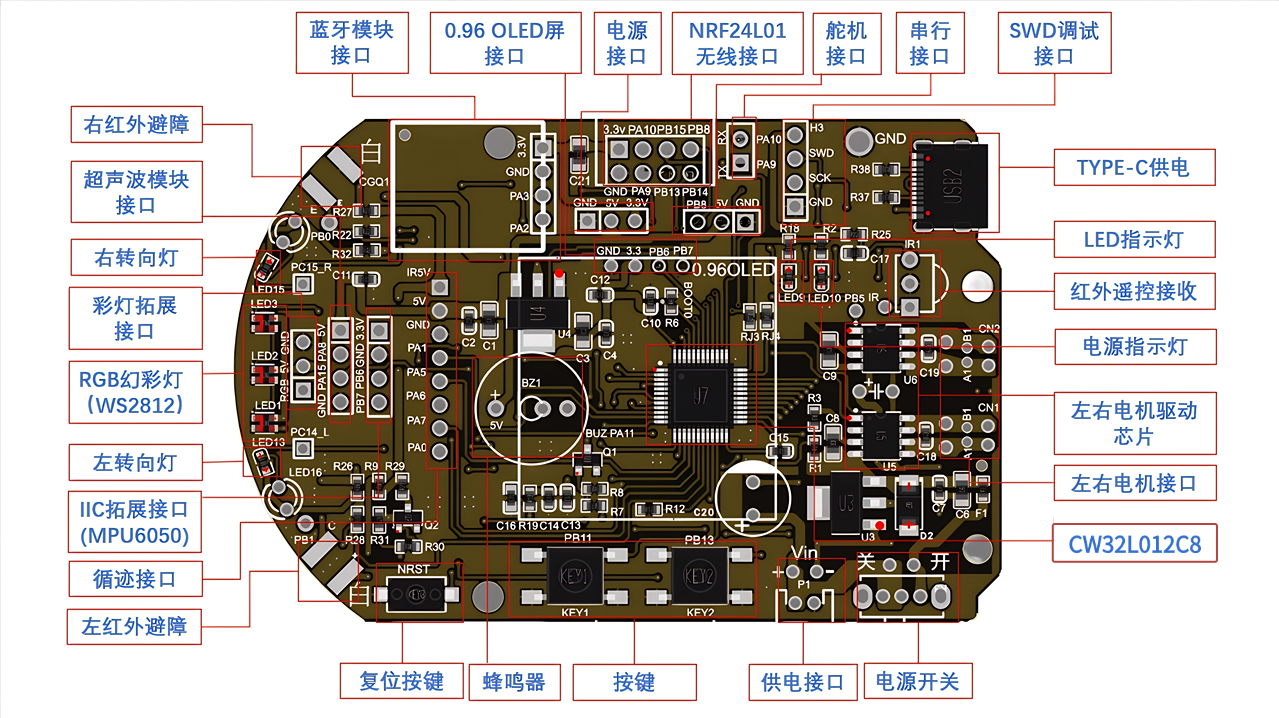
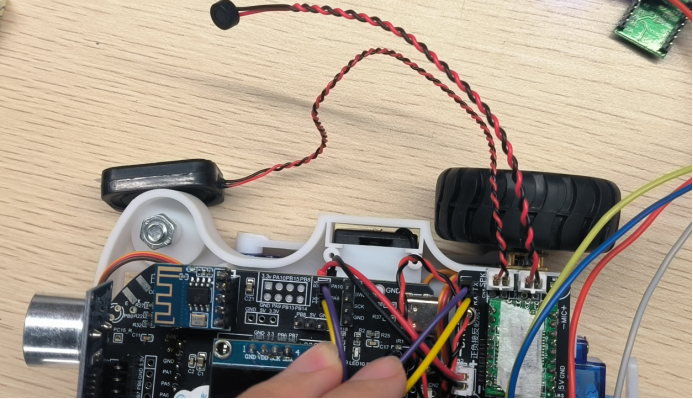
实物图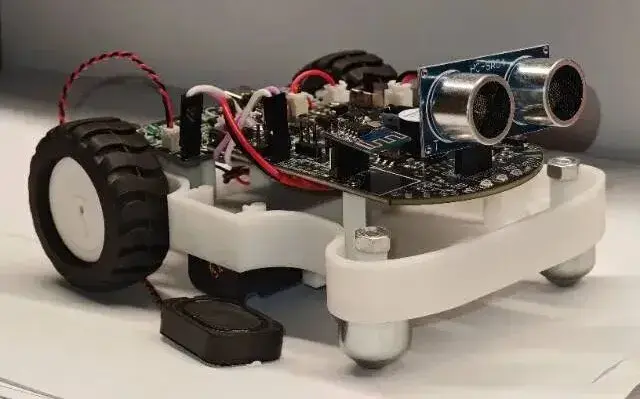
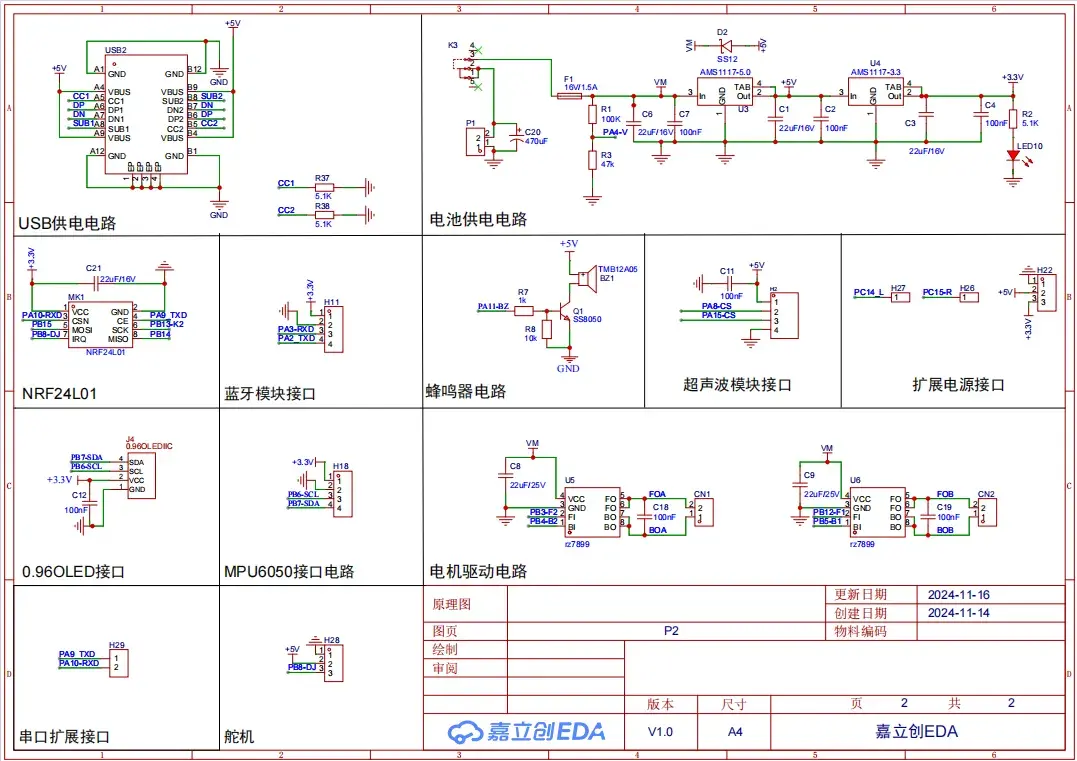
二、原理图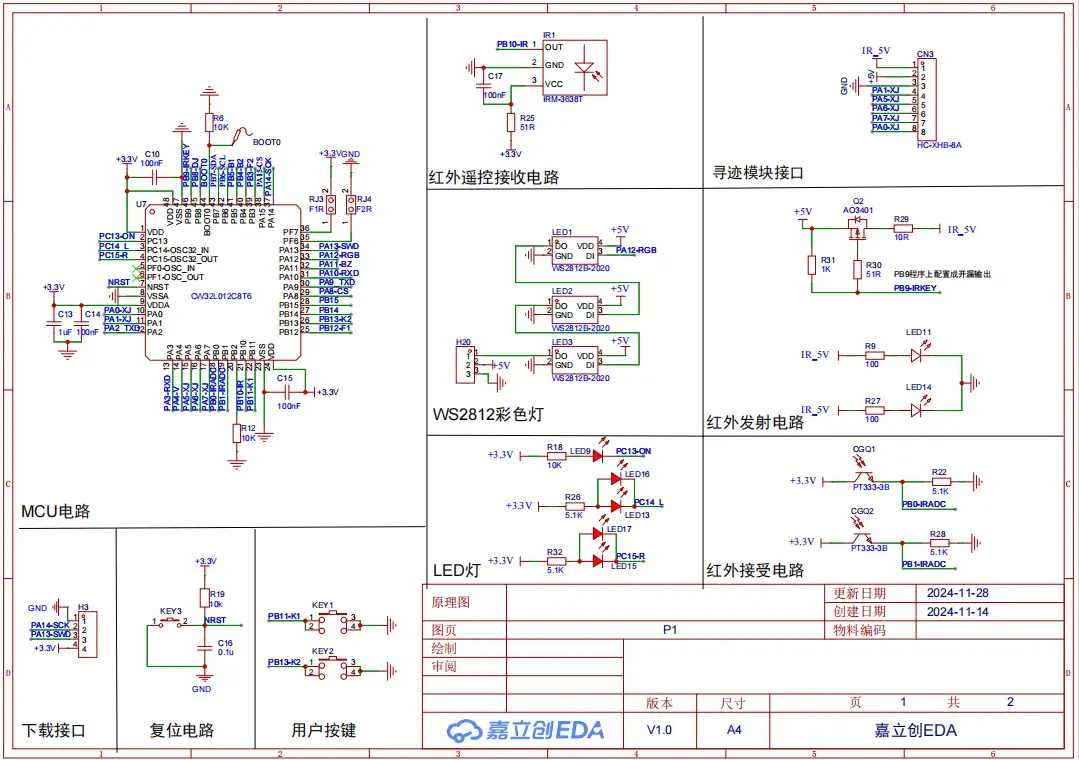
三、资料链接飞书信息链接:
https://dwi41yhz703.feishu.cn/wiki/B1Ihw31ebiX0vkkhQr2cINnkn1g?from=from_copylink

四、使用文档蓝牙遥控功能手机APP蓝牙调试器设置按钮:速度1~6对应小车的六种速度,前进、后退、左、右、停止对应小车的状态;
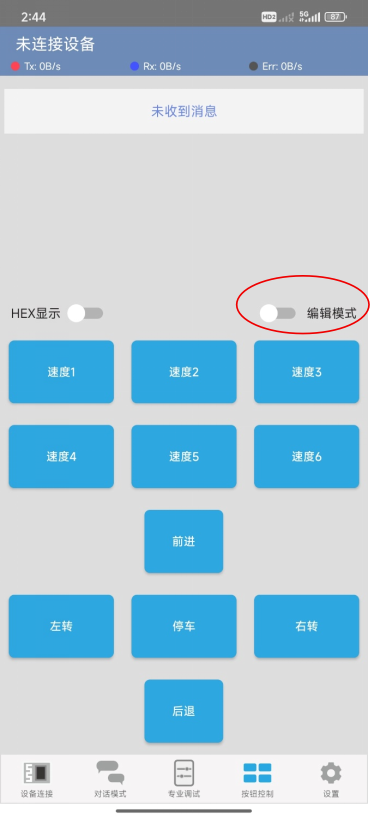
如图,编辑模式没有勾选,此时处于远程控制模式;如果您想编辑按钮,请勾选此选项。
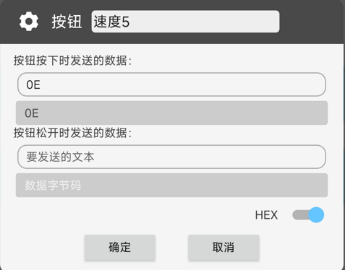
各个按钮的配置如下(勾选编辑模式开始编辑按钮,编辑按钮时勾选HEX):
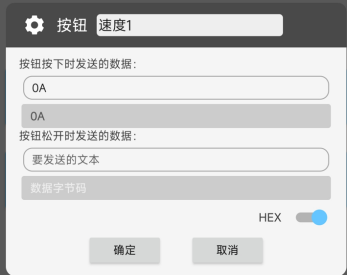




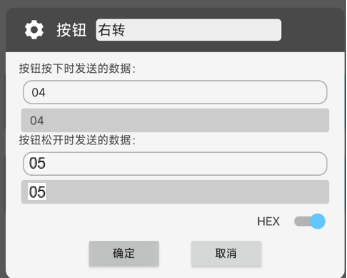

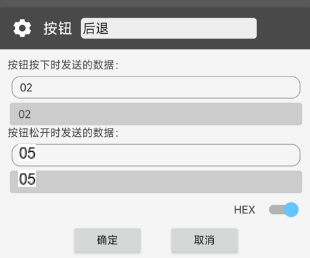
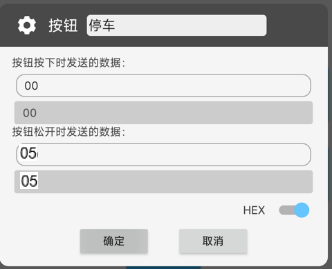
如果按下前进按钮,小车就会向前行驶,松手后自动停止,只需如上图编辑即可。
如果您想按下前进按钮,小车就会前进,松手后继续前进,请删除“松开按钮发送数据:”一栏的“05”
(前进、后退、左转、右转四个按钮同理)
连接蓝牙步骤:
打开手机蓝牙,给汽车通电,进入蓝牙调试器APP如下界面:
点击“XLBLE”右侧的“+”进行连接

未连接至接口
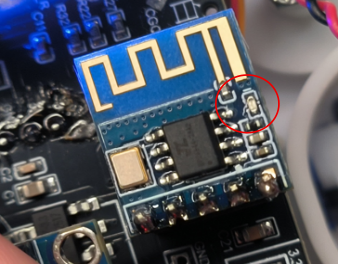
未连接时蓝牙模块状态

连接成功界面
连接成功时蓝牙模块状态
红外遥控功能命令集
避障功能介绍及注意事项
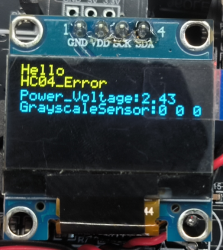
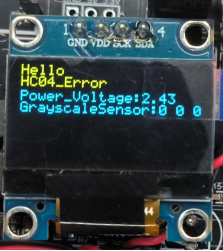
使用前请检查超声波是否工作正常: OLED是否显示HC04_Error(超声波异常、接触不良或电压不足或超过最大测量距离) 距离(超声波工作正常,显示到前方障碍物的距离,单位为cm)

超声异常图,

正常b超图片
功能介绍:当汽车向前行驶时,会检测前方障碍物的距离。如果小于10厘米,小车会自动左转/右转(1秒)避开障碍物,然后继续前进。
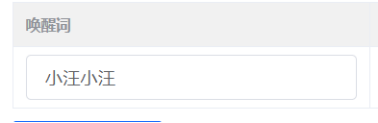
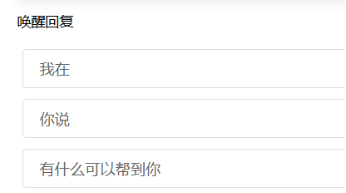
语音模块命令设置及接线


接线:
语音与主板串行通讯线(黄、紫):主板RX接语音扩展版TX,主板TX接语音扩展版RX
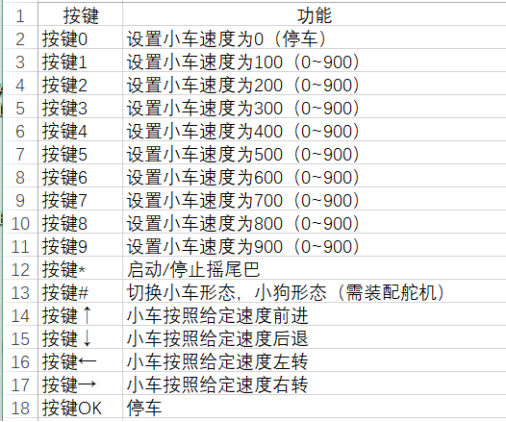
按键命令集
基础版程序(项目名称basic_car_cw32L012):按KEY1按钮小车停止,按KEY2按钮小车前进。
升级版程序(项目名称pro_car_cw32L012):按KEY1按钮使小车前进/停止,按KEY2按钮使小车变换形态(小车/四足)
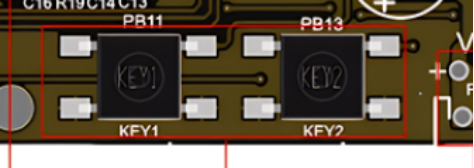
KEY1(左)KEY2(右)
OLED介绍
第二行:HC04_Error(超声波异常、接触不良或电压不足或超出最大测量距离)
距离(超声波正常工作并显示距前方障碍物的距离,单位厘米)
第三行:电池电压(单位V)
第四行(仅在程序的基础版本中可用):显示当前的跟踪状态;对应灰度传感器的左、中、右(1表示线被按下,0表示线未被按下)
超声异常图
正常b超图片
跟踪状态图
追踪功能(基础版扩展)
使用说明:程序会记录汽车在地图上的位置,并在开机时记录地图数据。当后续的灰度传感器检测到地图的颜色与上电时的颜色相差太大时,就会判断已经扫完线,并执行跟踪逻辑。
如果你是沿着白色地图上的黑线跑,需要先给地图上的白色位置通电(或者按复位键),然后才能控制小车移动。如果汽车在前进时检测到线路,就会自动执行跟踪逻辑。如果没有扫描该线,它将按照给定的指令正常移动。
灵敏度:如果地图颜色变化太小或者由于地图颜色导致跟踪状态始终不理想,可以更改main.c顶部的跟踪阈值变量Threshold。

OLED会显示跟踪状态,可以直观的看到灰度传感器状态:当前显示的跟踪状态对应左、中、右(1表示线路被按下,0表示线路未被按下)
跟踪状态图(第四行)
四足形态(基础版的扩展)
注:下载相应程序并上电后,四个脚默认均处于折叠状态(如下图)。请先给小车通电并正常连接舵机,然后再将塑料卡钳(机器人脚部)安装到舵机上,如下图所示。
脚初始上电状态图(另一侧同理)
功能:小车行驶过程中可以随时切换小车/四舵状态(红外遥控#键或KEY2按键)。依然可以通过蓝牙、红外、语音控制来控制,这和车状态下的功能是一致的。